SOFTWAREソフトウェア
-
筋骨格モデリング・解析システム
SIMM
-
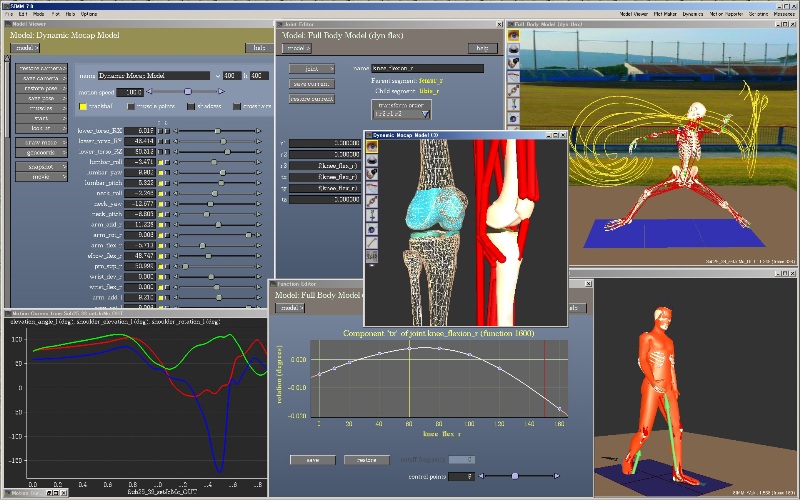
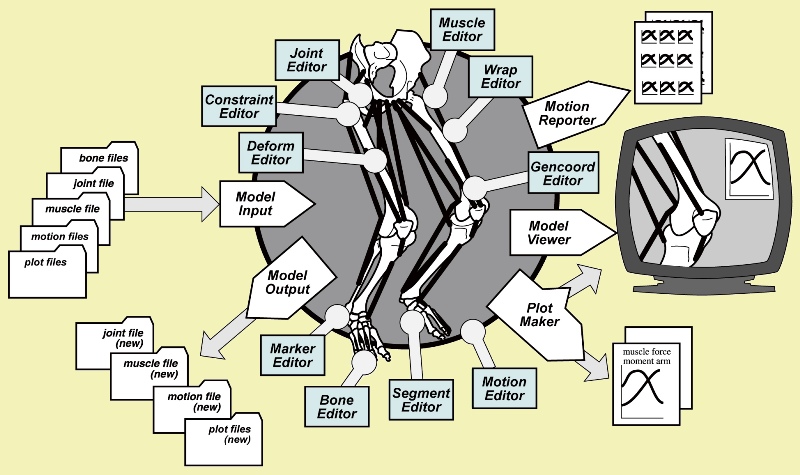
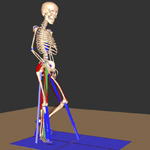
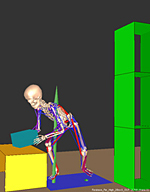
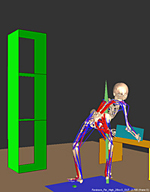
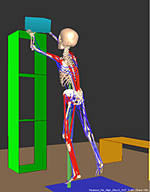
SIMM(シム)は、筋骨格モデルを迅速に作成、解析することが可能な対話型ソフトウェアです。SIMMでは、筋骨格モデルをジョイント(関節)により結合されたセグメント(骨)で構成し、筋腱アクチュエーターと靭帯は関節に跨り架かっています。SIMM上で表示されたモデルを操作することにより、ユーザーは筋骨格モデルの幾何学的形状や局所筋肉、ジョイントモーメント等についてパラメーター変更の影響を迅速に調査することができます。
プロダクトデザインやバイオメカニクス分野の多くの領域に適応することができ、世界中で使用されています。
SIMMはモジュールで構成されています。
【筋骨格モデル作成・編集ツール】
・SIMM Base Module: SIMMの基本となるモジュールです。
【筋骨格モデルモジュール】
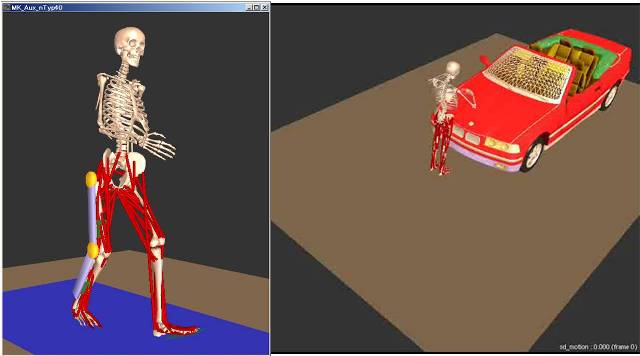
・Mocap Model: 下肢部分のみの簡略化された筋骨格モデルです。
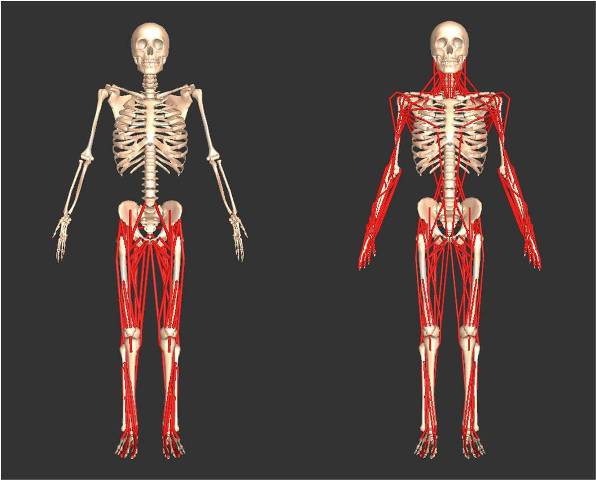
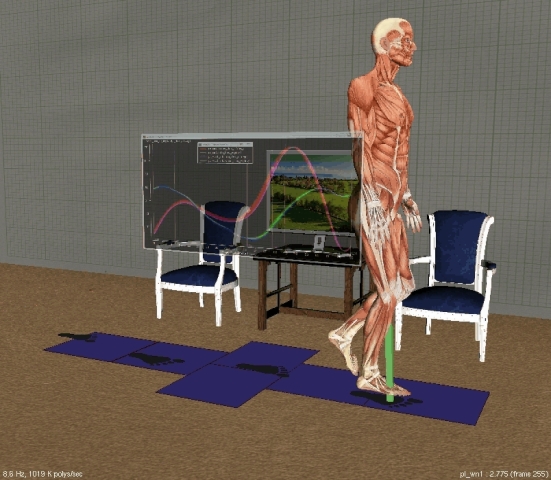
・Full Body Model: 全身の筋骨格モデルです。
【動作データ入力インターフェースモジュール】
・RT Motion Module: MAC3D Systemで計測されたデータを読み込みができます。また、リアルタイムで筋骨格にデータを反映できます。
・C3D Module: C3Dファイルで計測されたデータを読み込みができます。
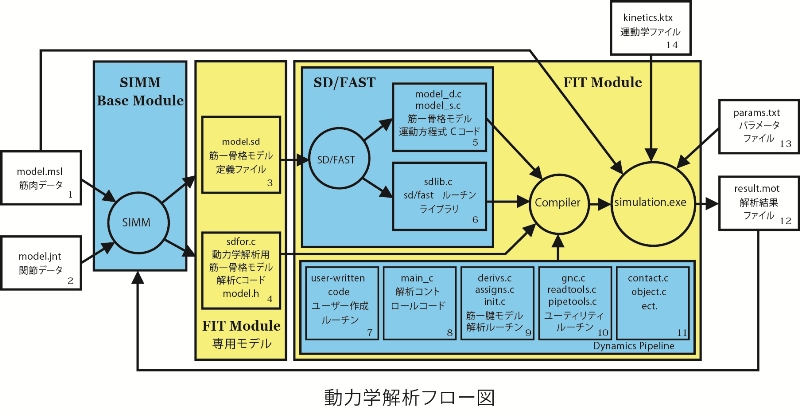
【動力学解析モジュール】
・Dynamics Pipeline: 筋骨格構造モデルの動力学シミュレーションを行うためのサブルーチンソフトウェアです。
・SD/FAST: Symbolic Dynamics社で開発された汎用機構解析ソフトウェアです。
・FIT Module: 簡易動力学解析モジュールです。今までは上記の2つを用いましたがそれらをDLL化したため、簡易に動力学解析が可能です。