


-
光学式モーションキャプチャーシステム MAC3D Systemは、お客さまによって多様な使い方で日々研究が行われています。その多くは、バイオメカニクス、スポーツ、リハビリ、ロボティクスに分類されます。本記事では、モーションキャプチャーカメラの使い方の中でも一風変わった使い方、昆虫を用いたロボティクス分野の研究を紹介します。
ここでご紹介するのは、大阪大学細田研究室のマルハナバチ飛翔の研究です。細田研究室は、昆虫を使った研究のほかに、人工筋で駆動するロボットアームやロボットハンド、脚ロボットの研究を行っています。
-
研究(計測)の概要
 昆虫操縦型のマルチコプタと聞いてどのようなイメージをされるでしょうか?
昆虫操縦型のマルチコプタと聞いてどのようなイメージをされるでしょうか?
マルハナバチは視覚刺激をもとに飛翔時の障害物を回避することが分かっています。研究では、マルハナバチの正面にモニターを配置し、ドローンカメラで撮影した映像をマルハナバチに見せることで、マルハナバチがどのような回避行動をとるのかを調べています。マルハナバチの回避行動をトルクメータで計測し、そのアナログデータをPCを通じてマルチコプタに出力します。変化した映像がマルハナバチにフィードバックされ、マルハナバチの挙動が変わります。このようなループでドローンを遠隔操縦します。*1)
*1)小林広希、清水正宏、山口美悠、細田耕(2018).マルハナバチによる遠隔操縦型マルチコプタの開発.Proceedings of the 2018 JSME Conference on Robotics and Mechatronics, Kitakyushu, Japan, June 2-5, 2018,2P2-M04
-
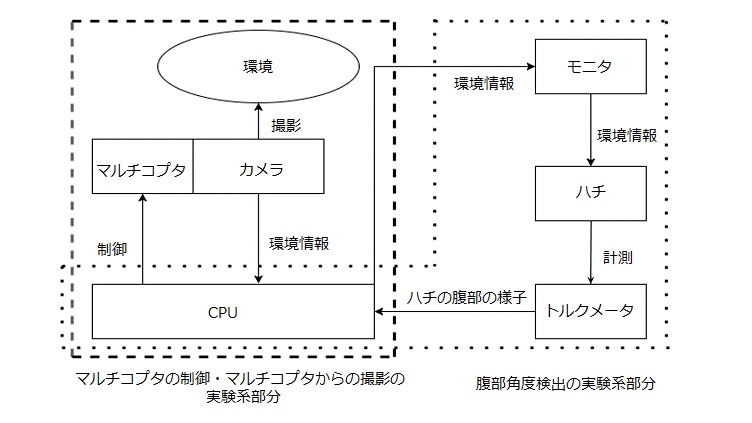 実験のシステム図1
実験のシステム図1 -
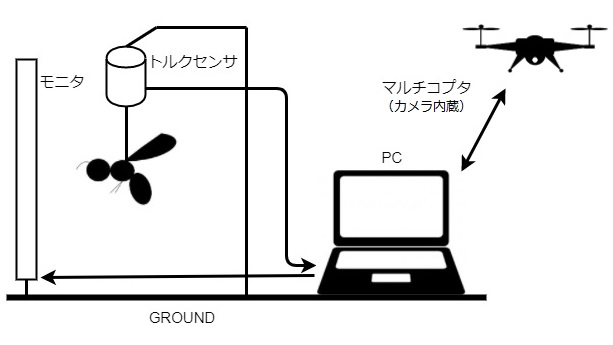 実験のシステム図2
実験のシステム図2 -
マルハナバチが視覚刺激によって環境の変化を認識するために、ドローンの飛行速度を適切に設定する必要があります。そのために、マルハナバチの飛翔軌跡と速度を計測する必要がありました。そこで、3次元的な動作と速度の推移を計測するために、MAC3D Systemを用いました。
実験は、マルハナバチの胴体部分に4mmサイズの反射マーカーを貼り付け、マルハナバチの飛行の軌跡をMAC3D Systemで計測するというものです。マーカーの位置座標情報から、飛行の軌跡と速度の検証を行いました。
 マーカーを貼り付けたマルハナバチ
マーカーを貼り付けたマルハナバチ マルハナバチが飛翔している様子
マルハナバチが飛翔している様子 -
 マーカーを貼り付けたマルハナバチのスケール被検体のマルハナバチはメスの3個体です。マルハナバチは、翅長別にA(16mm)、B(17mm)、C(mm)と名付けました。画像の左から順にA、B、Cの並びです。
マーカーを貼り付けたマルハナバチのスケール被検体のマルハナバチはメスの3個体です。マルハナバチは、翅長別にA(16mm)、B(17mm)、C(mm)と名付けました。画像の左から順にA、B、Cの並びです。
-
計測の結果
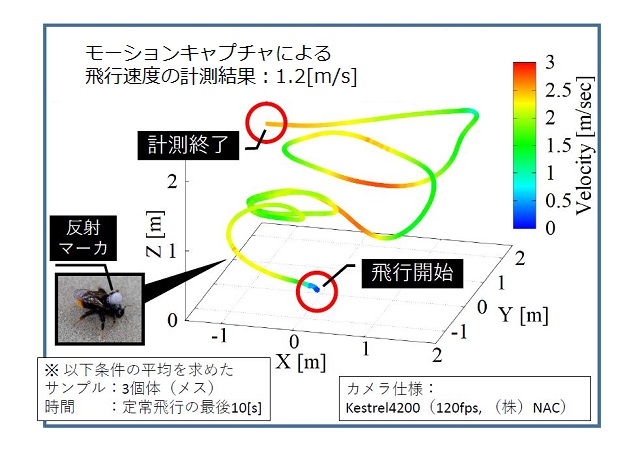 図の飛行軌跡と飛行速度は、マルハナバチCによるものです。
図の飛行軌跡と飛行速度は、マルハナバチCによるものです。
-
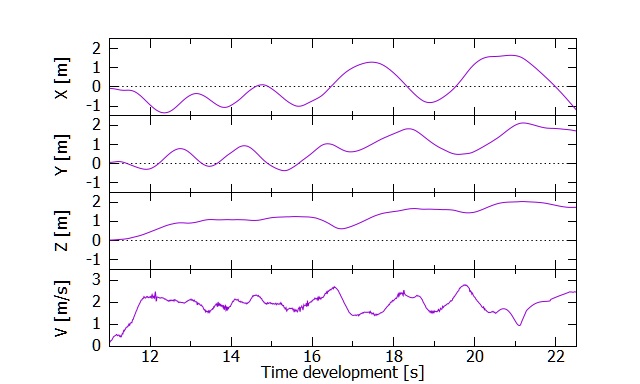 マルハナバチCの飛行軌跡と飛行速度のグラフです。こちらには載せていませんが、マーカー位置から加速度を求めることも可能です。
マルハナバチCの飛行軌跡と飛行速度のグラフです。こちらには載せていませんが、マーカー位置から加速度を求めることも可能です。
-
システム構成の詳細
<計測システム概要>
・使用カメラ Kestrel2200 × 8台
・サンプリング周波数 120fps
・計測範囲 3m×5m×1.8m
-
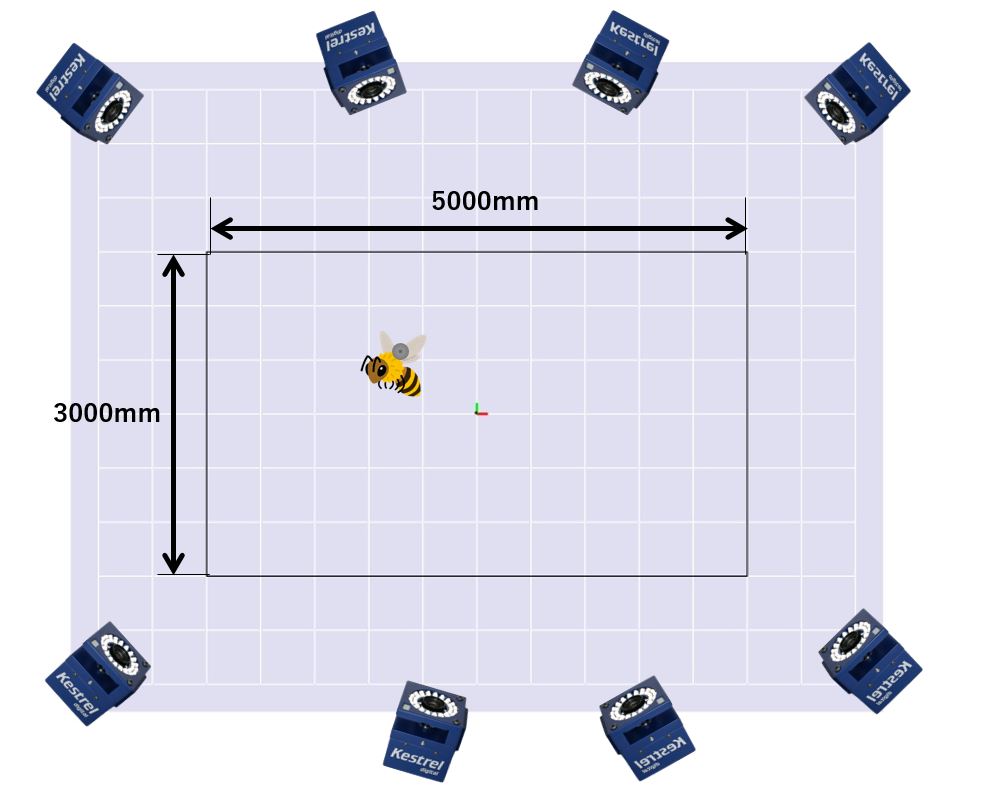 MAC3D System 計測イメージ図Kestrel2200カメラは、小型・軽量で220万画素の高解像度、横方向の画角が83度と広い点が特長のカメラです。そして、この高解像度・幅広のセンサーは、今回のマルハナバチ実験のような小型のマーカーを使って自由な動きを計測することに向いています。
MAC3D System 計測イメージ図Kestrel2200カメラは、小型・軽量で220万画素の高解像度、横方向の画角が83度と広い点が特長のカメラです。そして、この高解像度・幅広のセンサーは、今回のマルハナバチ実験のような小型のマーカーを使って自由な動きを計測することに向いています。
-
今後、大阪大学細田研究室では、マルハナバチの飛翔行動を実装したドローン開発に取り組んでいくとのことでした。MAC3D Systemを使って、ドローンの制御則の構築、マルハナバチの学習能力や適応能力の検証および、非拘束下のマルハナバチの適用的飛翔行動の観察を進めていくとのことです。
-
関連リンク
-

