


-
筋骨格モデル Musculoskeletal Modelingを用いた、人の筋張力推定についての研究は、近年盛んに行われています。筋骨格モデルは、モーションキャプチャーデータと組み合わせることで関節角度や関節トルク、筋張力を推定することができます。主にスポーツ、リハビリにおけるバイオメカニクス研究のツールとして広く使われるようになりました。
筋骨格モデルの研究は、バイオメカニクス分野のほかにもロボット工学分野でも盛んに行われています。
弊社の筋骨格モデル動作解析ソフトウェア「nMotion musculous」もロボット工学の第一人者である東京大学大学院情報理工学系研究科 中村仁彦教授らの研究成果をもとに開発されています。
中村仁彦教授の研究室では、モーションキャプチャーシステム「MAC3D System」を活用いただき、筋骨格モデルを使った多様なシステム開発および、バイオメカニクス分析を行っています。ここでは、その一例をご紹介します。
-
Magic Mirror リアルタイム筋張力推定システム
 Magic Mirror(マジックミラー)は、MAC3D Systemより送られてくるデータと筋骨格モデルを用いて、関節角度や筋張力をリアルタイムで推定計算、表示するシステムです。
Magic Mirror(マジックミラー)は、MAC3D Systemより送られてくるデータと筋骨格モデルを用いて、関節角度や筋張力をリアルタイムで推定計算、表示するシステムです。
-
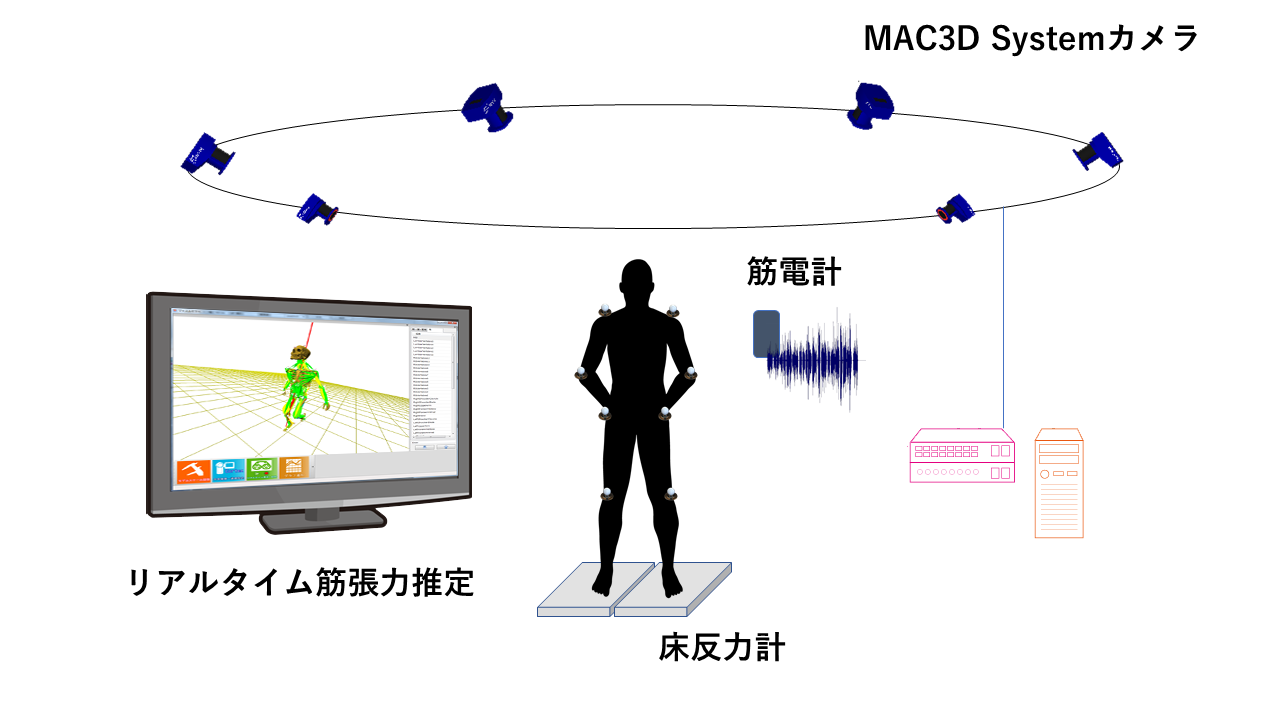 Magic Mirror システム図
Magic Mirror システム図 -
まず、MAC3D Systemで計測したマーカーデータと筋骨格モデルより逆運動学計算を行い、関節角度を求めます。筋骨格モデルは被験者に近い寸法にしているので、より正確な関節角度を実現します。
骨格モデルに全質量の慣性パラメーターを持たせて、計算された関節角度・運動データから逆動力学計算を行います。関節トルクと人にかかる外力が推定計算されます。
生理学的筋モデルにもとづき筋張力を計算します。筋電計が付いている筋についてはそれを参考にして、筋電計が付いていない筋については 「人は動く時に最小の筋力で動いている」という仮定のもと各筋張力を計算します。
このような過程で推定された筋張力は、リアルタイムで可視化され、3DCGで表現されます。また、3DCGとビデオカメラ映像を重畳することができ、被験者へフィードバックも容易にできます。
 マジックミラーあん馬
マジックミラーあん馬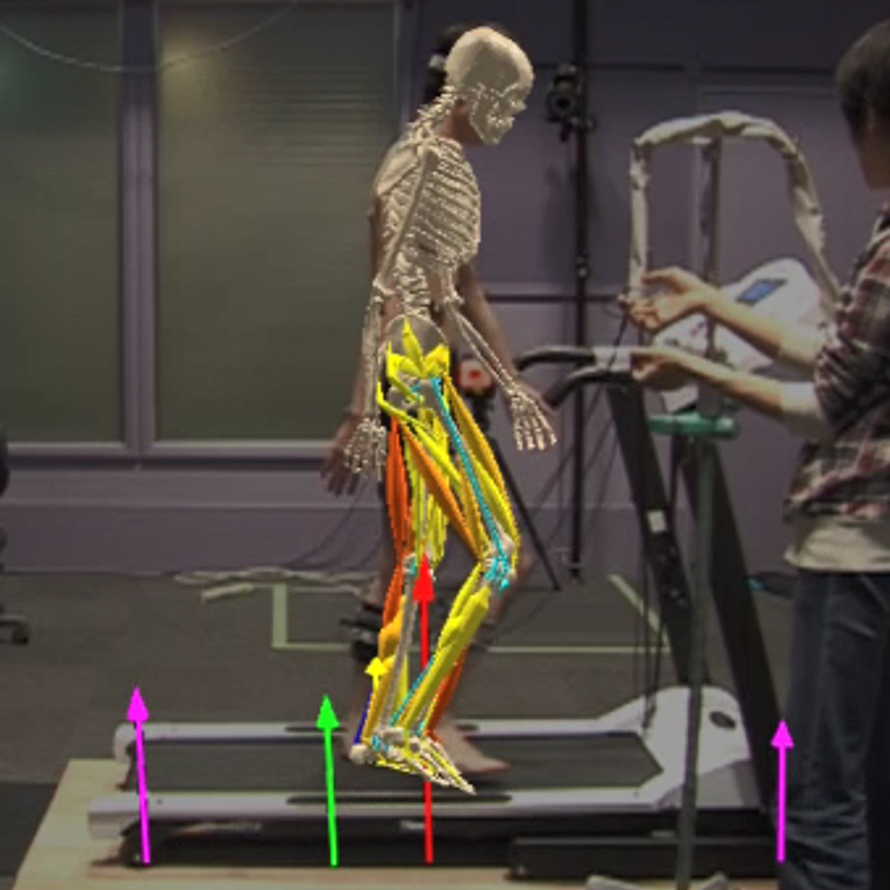 マジックミラー歩行
マジックミラー歩行 -
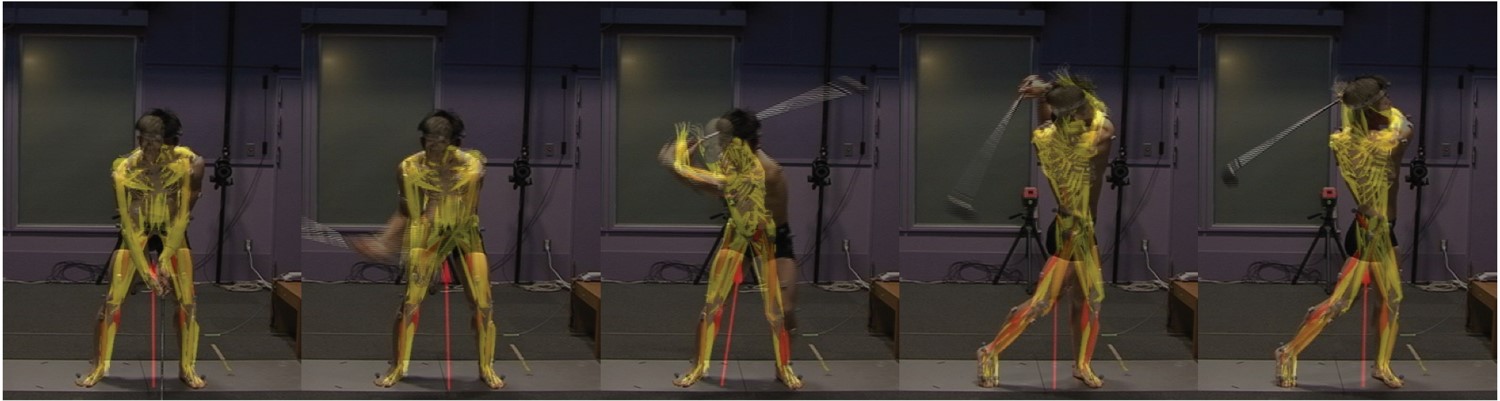 マジックミラーゴルフMagic Mirror(マジックミラー)についての文献
マジックミラーゴルフMagic Mirror(マジックミラー)についての文献
Musculoskeletal Modeling and Physiological Validation
Akihiko Murai1, Kazunari Takeichi1, Taira Miyatake1, and Yoshihiko Nakamura1
2014 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO)
September 11-13, 2014. Evanston, Illinois, USA
K. Ayusawa, Y. Nakamura, “Fast Estimation of Muscle Tensions by Gradient Computation Based on Inverse Dynamics and Differential Forward Kinematics,” JSME Robotics and Mechatronics Conference 2011, 2P2-K14, 2011.
鮎澤光, 中村仁彦, "勾配計算分解を用いた逆運動学計算の高速化および大自由度筋骨格モデルへの応用", 第17回ロボティクスシンポジア, pp.148-155, 山口県萩市, March 14-15, 2012.
K. Ayusawa, Y. Nakamura, “Fast Inverse Kinematics Algorithm for Large DOF System with Decomposed Gradient Computation Based on Recursive Formulation of Equilibrium.” IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3447-3452, Vilamoura, Portugal, 2012.
鮎澤光,中村仁彦:“詳細筋骨格力学計算のための二次計画ソルバーの開発”,日本機械学会ロボティクス・メカトロニクス講演会,1A2-K08,つくば国際会議場,5月23日―24日,2013.
-
関連リンク
-

